Deborah R. Fowler
click here for Blade 3.1 / 3.3.1 User's Guide
previous step next
Posted on Dec 5 2013
Updated Mar 25 2016
Blade 3.1 / 3.3.1
Calibrating Actors - Capturing ROM
ROM (Range of Motion) - bend every joint to
their limits
Capturing is the process of recording all 2D
camera data. When capturing, only 2D camera data is recorded,
although you see 3D data in your workspace. Once saved, the data
can be processed offline, providing the 3D "reconstructions".
Note we use a t-pose because autolabel looks for this and in
addition, characters models are easy to append skeletons to the
models.
Your database should have already been set
up!!! If for some odd reason it has
not - make sure it is in place now. See database setup.
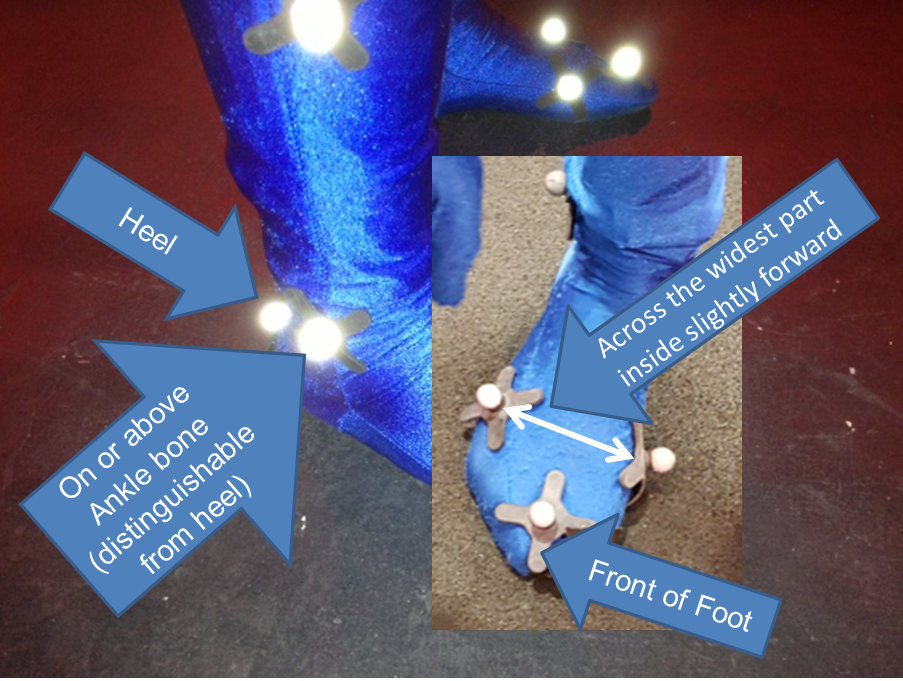
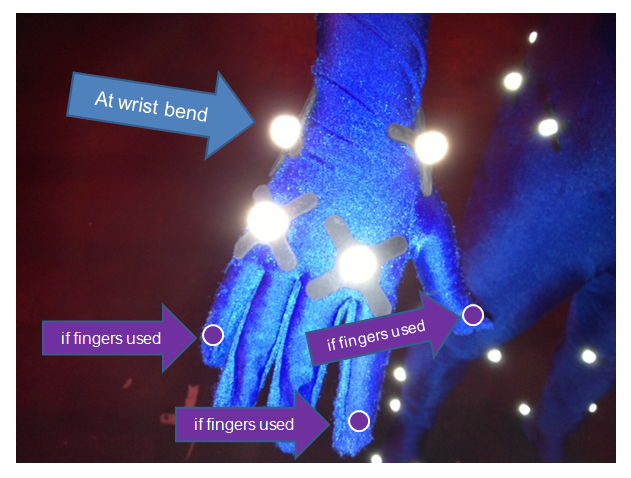
Marker Placement
We are using a passive optical system; markers are made of tiny glass beads, 3M retro-reflective tape would work too. Space defined by inside the lines of tape, using 4M Pixel cameras. Marker positions match the vicon skeleton template.
|
53 markers total (when doing fingers there will be 59 total) CLICK BLUE LINKS BELOW FOR PICS
The thigh and mid-calf markers are slightly offset to allow the software to distinguish right/left Hint: Wiggle the velcro markers a bit on the suit to help them stick (particularly the hands/feet/knees) Why this way? The skeleton in the software is defined in this way so that it understands this configuration. It corresponds to this set up when labeling the markers and creating the skeleton. Note - in 3.1 / 3.3.1 a vsk (autosaved) and vss (manually saved) file are created ... read on |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Hint: If the velcro markers are not sticking properly, wiggle them a little on the material.
Capture ROM
Under the Studio Activities tab,
click on the Capture Layout button to reconfigure the
Blade workspace. In the Capture pane, enter a take name
appropriate for a character range of motions (ROM). Label such
as DeborahROM.
Now capture the range of motion. It is
important to have the actor go through the extent of the
movement his body will perform during the subsequent captures.
This looks somewhat like a stretching/yoga/exercise class but
the goal is to inform the software of how much movement will
happen - so exercise all rotation extremes for every joint.
Typically we practice a ROM with the following
movement (movements added recently are in italics):
Correct T-pose has feet straight forward, shoulder width apart, arms out straight like a T, not above or below the shoulders Hint: splaying your fingers may help you remember to keep your arms in the right position - try it.
|
Start the capture, perform the above movements
and end your capture. The provided information to create an
accurate skeleton for vsk. In other words, it defines the
constraints of motion for the skeleton.
Next we will process
the ROM
NOTE: In the Perspective view, right-click on
the context menu and click Show Trajectory Count (from the
Capture a Range of Motion page in the documentation) to confirm
the number of markers.